Opracowanie i implementacja nowych metod lokalizacji, budowy mapy oraz planowania ruchu z użyciem czujników RGB-D w zrobotyzowanych systemach elastycznej produkcji
Celem projektu było opracowanie nowych metod percepcji wykorzystujących czujniki 3D, umożliwiających elastyczną pracę robota manipulacyjnego w przemyśle wytwórczym
 Tytuł projektu
Tytuł projektu
Opracowanie i implementacja nowych metod lokalizacji, budowy mapy oraz planowania ruchu z użyciem czujników RGB-D w zrobotyzowanych systemach elastycznej produkcji
 Nazwa
Beneficjenta/Beneficjentów
Nazwa
Beneficjenta/Beneficjentów
Politechnika Poznańska
 Nazwa programu
Nazwa programu
Programy krajowe
 Konkurs
Konkurs
Lider VIII
 Wartość projektu
Wartość projektu
1 198 705,00 zł
 Wartość dofinansowania
Wartość dofinansowania
1 198 705,00 zł
 Okres realizacji projektu
Okres realizacji projektu
od 01.01.2018 r. do 30.06.2021 r.
Poznajcie nasz zespół
Zobacz efekt naszej pracy
Autonomiczna jazda pomiędzy stanowiskami pracy
Jaki problem rozwiązuje nasz projekt?
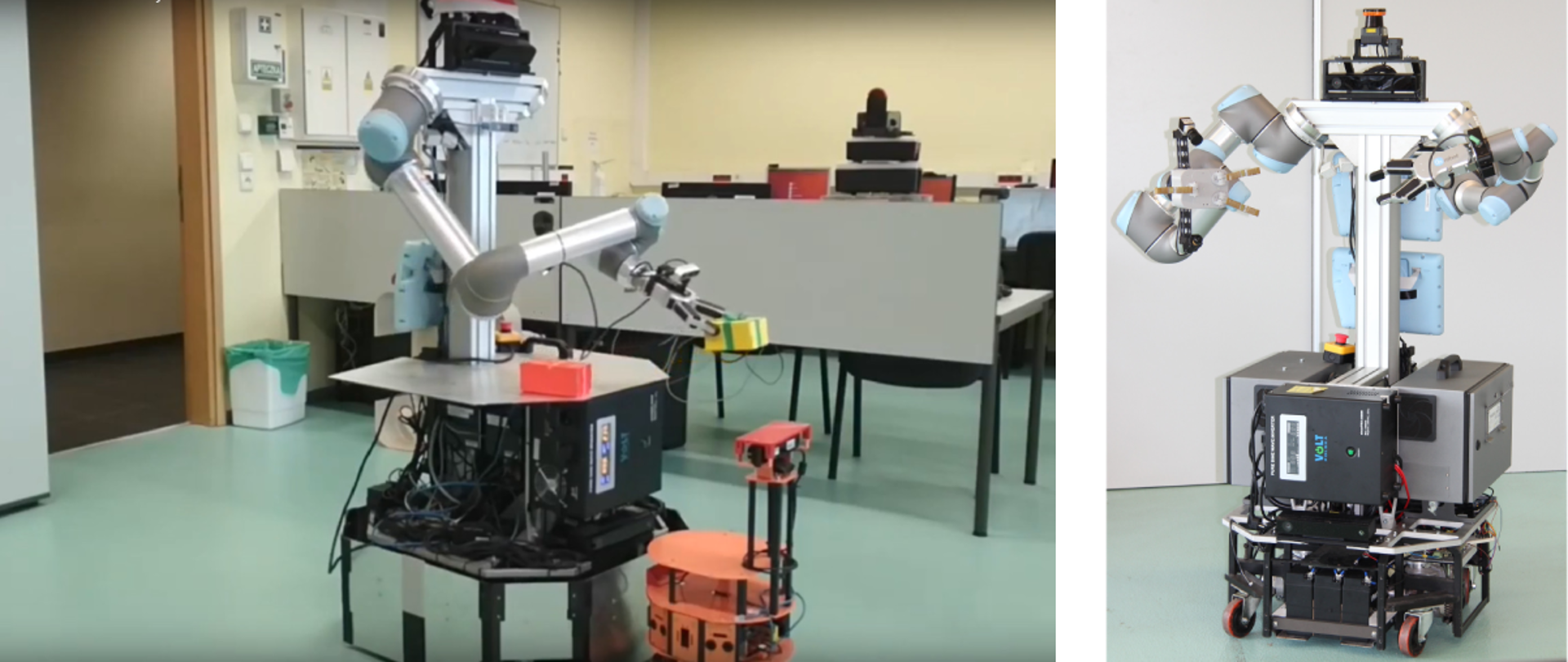
Celem projektu było opracowanie nowych metod percepcji wykorzystujących czujniki 3D, umożliwiających elastyczną pracę robota manipulacyjnego w przemyśle wytwórczym. W ramach projektu powstał manipulacyjny robot mobilny zdolny do autonomicznego przemieszczania się pomiędzy stanowiskami wytwórczymi. Dzięki temu robot może być wykorzystany do pracy na kilku stanowiskach jednocześnie. Ponieważ użyte zostały ramiona kooperacyjne, robot współdzieli przestrzeń roboczą z człowiekiem i nie ma potrzeby dodatkowego przygotowania stanowiska pracy. Ponadto robot jest wyposażony w czujniki 3D (kamery RGB-D i skanery laserowe), które umożliwiają zbudowanie modelu 3D otoczenia i manipulację obiektami, bez konieczności specjalistycznego programowania robota. Dzięki nowemu systemowi percepcji robot jest w stanie lokalizować i przemieszczać się pomiędzy stanowiskami pracy, pozycjonować względem stanowiska, identyfikować i manipulować obiektami na scenie, unikając kolizji z maszynami. Został również przygotowany interfejs wydawania poleceń głosowych robotowi, który umożliwia przeprogramowywanie robota w elastycznym systemie produkcji, bez konieczności znajomości wiedzy z zakresu kinematyki i sterowania robotów.
Kto korzysta/skorzysta z wyników projektu?
Kooperacyjne roboty mobilno-manipulacyjne są doskonałą odpowiedzią na zapotrzebowanie przedsiębiorców na siłę roboczą. Szczególnie duże zainteresowanie można zaobserwować po stronie małych i średnich przedsiębiorstw. Większość dużych zakładów produkcyjnych jest już zrobotyzowana przy użyciu klasycznych robotów przemysłowych. Naszym celem jest stworzenie produktu (oprogramowania robotów) przeznaczonego do działania na robotach pracujących w elastycznym systemie produkcyjnym, czyli skierowanego do małych i średnich przedsiębiorstw odpowiedzialnych obecnie za ponad 50% PKB.
Cena nowych robotów staje się coraz bardziej konkurencyjna, biorąc pod uwagę rosnące koszty pracy ludzkiej i niechęć ludzi do wykonywania pewnej klasy zadań. Pojawiają się również czujniki, które przy opracowaniu odpowiednich algorytmów (deklarowanych w projekcie), mogą zostać użyte do stworzenia elastycznych systemów produkcji.
W projekcie odwołujemy się do trzech scenariuszy demonstracyjnych:
- niskoseryjnej produkcji przemysłowej w branży motoryzacyjnej i budowlanej (obsługa przez robota maszyn CNC przy produkcji detali aluminiowych i stalowych),
- branży konfekcyjnej (produkcja guzików),
- badań laboratoryjnych wykonywanych przez robota (asystent w laboratorium chemicznym lub
biotechnologicznym).
Jednak opracowany robot jest przeznaczony do wykonywania większości zadań, jakie wykonują ludzie w procesie produkcyjnym. Przy odpowiednich zmianach w oprogramowaniu robot może zająć się zadaniami, jak np.:
- sortowanie owoców (twardych typu jabłka i gruszki),
- produkcja mebli (do nakładania kleju),
- kontrola jakości (po wyposażeniu robota w odpowiednie czujniki), itd.