SkanDRON
System umożliwia wykrycie i śledzenie nawet małych obiektów, o wymiarach nie mniejszych niż 18 cm x 32 cm
 Tytuł projektu
Tytuł projektu
Laserowy system wykrywania i śledzenia nisko latających obiektów – SkanDRON
 Nazwa Beneficjenta/Beneficjentów
Nazwa Beneficjenta/Beneficjentów
- Wojskowa Akademia Techniczna im. Jarosława Dąbrowskiego – Instytut Optoelektroniki (Lider)
- Instytut Techniczny Wojsk Lotniczych (Konsorcjant)
- Kenbit Koenig i Wspólnicy Sp. J (Konsorcjant)
- Nordcom Sp. z o.o. (Konsorcjant)



 Nazwa programu
Nazwa programu
Projekt realizowany na rzecz Obronności i Bezpieczeństwa Państwa
 Konkurs
Konkurs
Konkurs 9/2018
 Wartość projektu
Wartość projektu
9 154 198,00 zł
 Wartość dofinansowania
Wartość dofinansowania
8 914 198,00 zł
 Okres realizacji projektu
Okres realizacji projektu
od 10.12.2018 r. do 09.12.2021 r.
Poznajcie nasz zespół
Zespół po wykonaniu testów terenowych (od prawej strony):

- ppłk dr inż. Marek Życzkowski (kierownik projektu) (drugi od prawej)
- dr inż. Marek Zygmunt (trzeci od prawej)
- ppłk dr inż. Tadeusz Drozd (czwarty od prawej)
- ppłk dr inż. Jacek Wojtanowski (itd.)
- mjr mgr inż. Marcin Jakubaszek
- mgr inż. Piotr Markowski
- mgr inż. Konrad Brewczyński
Zobacz efekt naszej pracy
Jaki problem rozwiązuje nasz projekt?
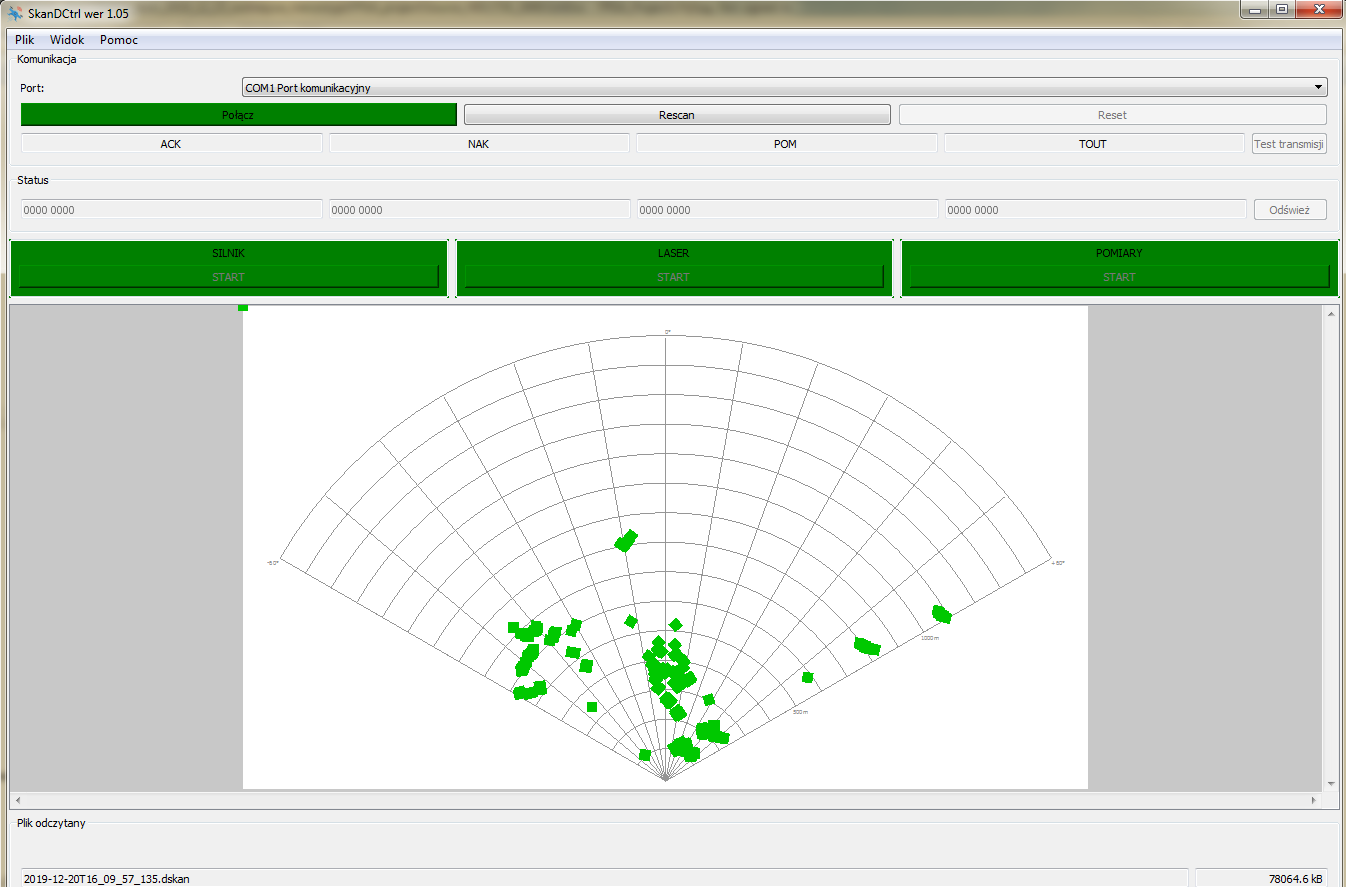
System umożliwia wykrycie i śledzenie nawet małych obiektów, o wymiarach nie mniejszych niż 18 cm x 32 cm. Charakteryzują się one reflektancją (jest to parametr określający odbicie wiązki promieniowania laserowego) na poziomie powyżej 20%. Opracowany w Instytucie Optoelektroniki WAT skaner skutecznie wykrywa takie drony z odległości 850 m. Każdy obiekt większy lub o wyższej niż podana reflektancji promieniowania, wykrywany jest na dużo większych odległościach. Przykładowo samolot zostanie wykryty z około kilku kilometrów. Przedstawione parametry to wartości krytyczne. Oznacza to, że z odległości 850 m skaner wykryje obiekty poruszające się z maksymalną technologicznie prędkością. Jeśli natomiast statek powietrzny będzie leciał wolno, to system wykryje go dużo wcześniej.
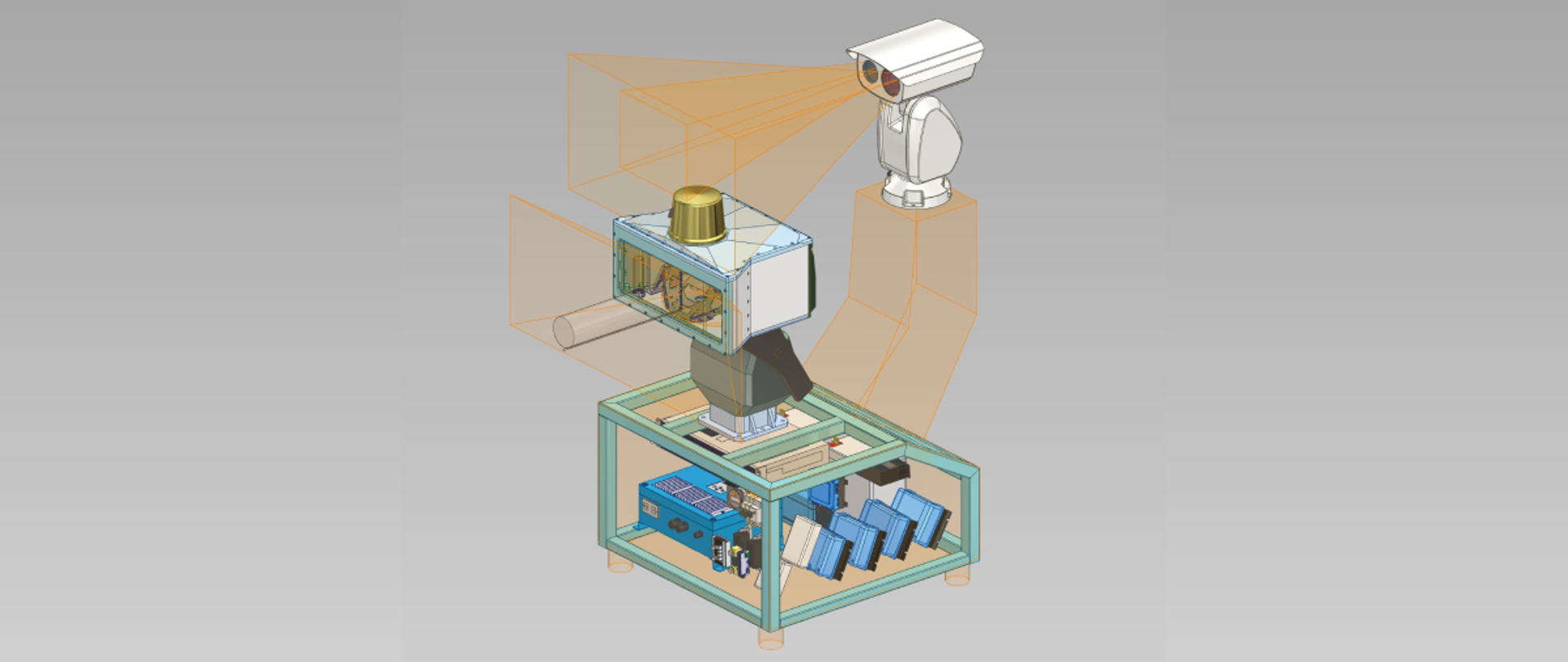
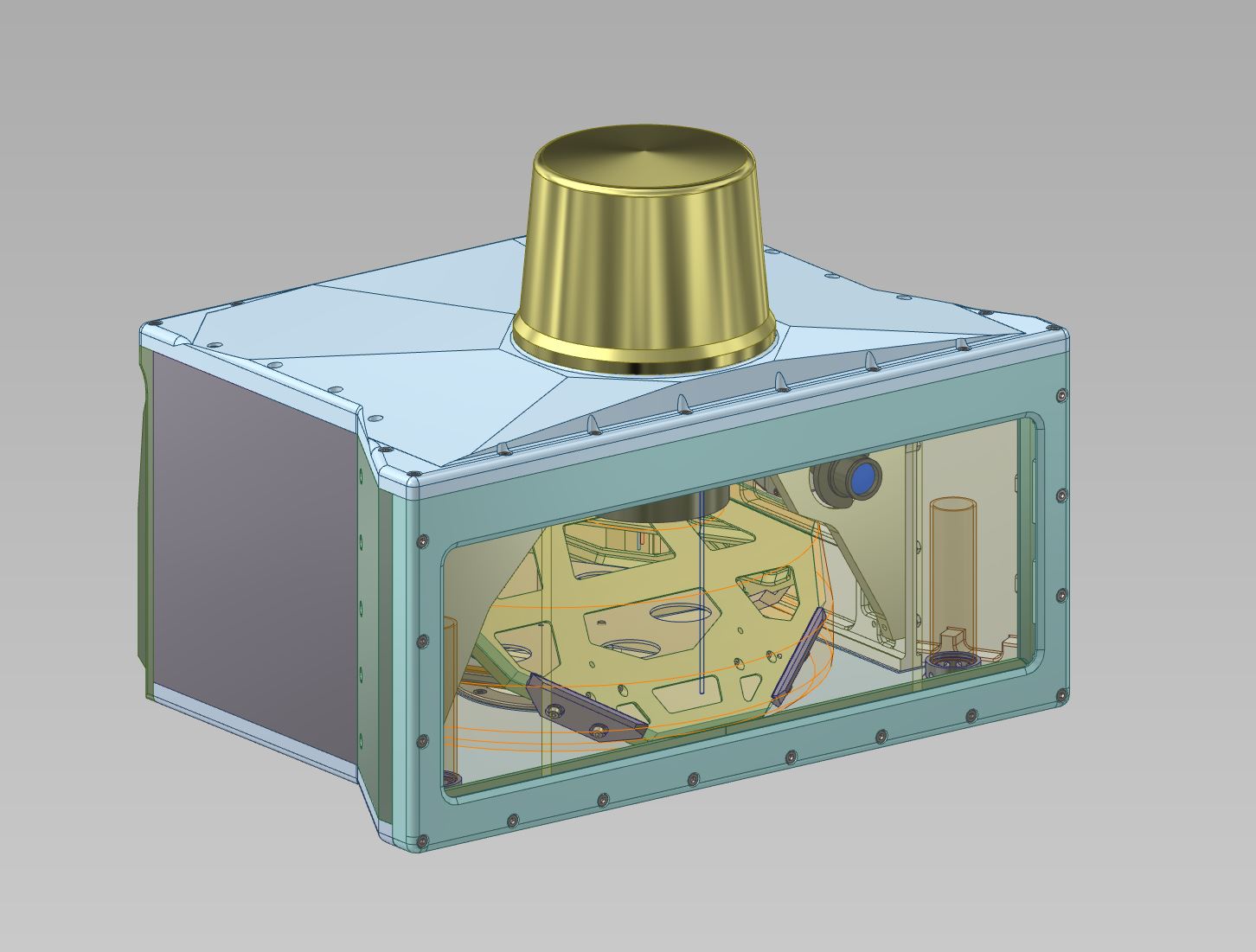
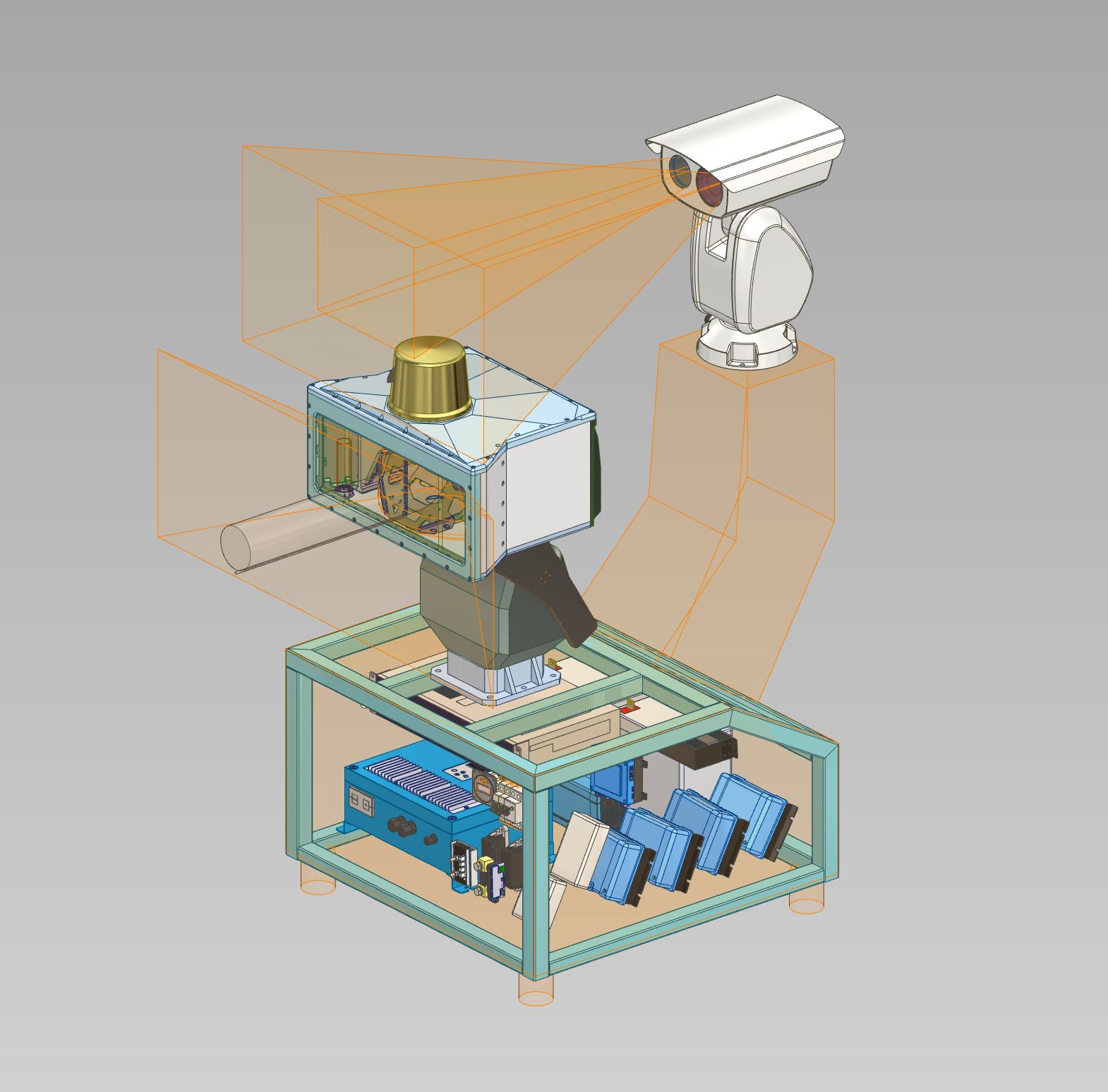
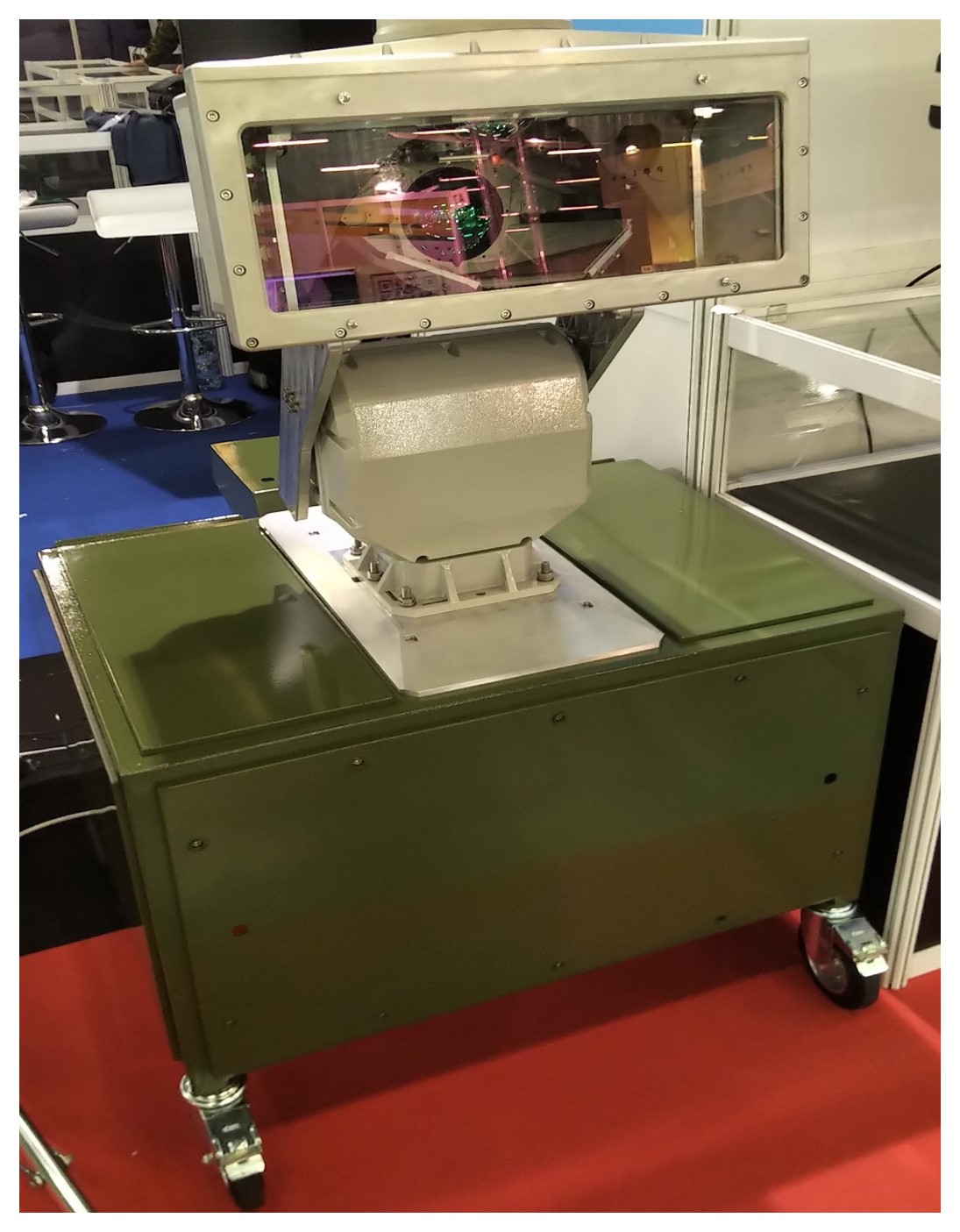
Kluczowym komponentem systemu, który powstał w ramach projektu, jest opracowany od podstaw, skaner laserowy. Umożliwia on, w sposób ciągły, monitorowanie obserwowanego sektora w kącie 120° oraz w czasie rzeczywistym, wyznaczenie lokalizacji pojawiających się obiektów. Wstępna klasyfikacja, wykrytych w ten sposób obiektów, dokonywana jest w systemie na podstawie sygnatur depolaryzacji promieniowania odbitego.
Wyznaczone przez skaner laserowy precyzyjne dane o położeniu wykrytego obiektu, przekazywane są programowo do modułu sterowania głowicą optoelektroniczną (dualną kamerą wizyjną i termowizyjną). Moduł ten ustawia właściwy kierunek obserwacji kamery oraz optymalne parametry powiększenia, dzięki elektronicznie regulowanemu zoomowi. Pozwala to na wizualne odwzorowanie podejrzanego obiektu i umożliwia operatorowi systemu jego weryfikację.
Kto korzysta/skorzysta z wyników projektu?
Z funkcjonalności tego systemu będą mogły skorzystać służby i formacje wykonujące zadania z zakresu:
- ochrony infrastruktury krytycznej,
- zabezpieczenia imprez masowych,
- ochrony obiektów i mienia,
- przeciwdziałania nielegalnemu wykorzystaniu UAV (Unmanned Aerial Vehicles – Bezzałogowych Statków Powietrznych, zwanych potocznie dronami).
System pozwoli przeciwdziałać wykorzystaniu obiektów bezzałogowych w przestępczości granicznej. Zostanie zastosowany do ograniczenia nieuprawnionego przekraczania granicy państwowej, jak również niekontrolowanych lotów w pobliżu granicy państwowej.